Stabilitätsgebiet
In der Numerik gewöhnlicher Differentialgleichungen ist das Stabilitätsgebiet eines Verfahrens zur Lösung eines Anfangswertproblems anschaulich ein Indikator dafür, wie „pflegeleicht“ sich dieses Verfahren bei steifen Differentialgleichungen verhält.

Besonders interessant ist der Fall, wenn das Stabilitätsgebiet die komplette linke Halbebene enthält, dann heißt das Verfahren A-stabil.
Definition
Dafür betrachtet man das Verfahren beim Lösen der dahlquistschen Testgleichung


für eine komplexe Zahl bei fester Schrittweite . Offenbar ist die analytische Lösung .



Das Verfahren ergebe dafür die diskrete Approximation , also

- mit
- .


Allgemein
Ein hinreichendes Kriterium für die Stabilität ist, dass die durch das Verfahren ermittelte Näherung (genau wie die exakte Lösung) monoton fallend ist, sprich für alle die nächste Näherung maximal so groß ist wie die vorherige: .


Ist dieses Kriterium für ein Paar erfüllt, liegt im Stabilitätsgebiet , ansonsten nicht.



Mit Stabilitätsfunktion
Einfach berechnen lässt sich das Stabilitätsgebiet, wenn das Verfahren bezüglich der Testgleichung eine Stabilitätsfunktion besitzt, d. h. beziehungsweise rekursiv .



Da per Definition nicht vom aktuellen Schritt abhängt, ist die Folge der Näherungen genau dann monoton fallend, wenn der Betrag des Faktors ist – und genau dann streng monoton fallend, wenn sogar .



Ob man das Gebiet nun strikt oder abgeschlossen definiert, unterscheidet sich, aber es ergibt sich z. B.

Beispiele
Alle Runge-Kutta-Verfahren haben eine Stabilitätsfunktion; bei expliziten Verfahren ist diese ein Polynom, bei impliziten wenigstens noch eine rationale Funktion, wobei die Grade jeweils durch die Schrittzahl des Verfahrens beschränkt sind.

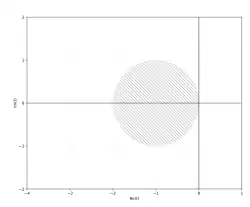
Für das explizite Euler-Verfahren gilt
- ,

die Stabilitätsfunktion ist daher . Damit liegt im Stabilitätsgebiet falls , d. h. genau dann wenn im 1-Ball um liegt. Es folgt




- .

Dieses Stabilitätsgebiet ist (wie auch jenes anderer expliziter Verfahren) beschränkt. Daher wird man, auch wenn dies die Genauigkeit gar nicht verlangen würde, zu einer Einschränkung der Schrittweite gezwungen. Dies hat zur Folge, dass implizite Verfahren beim Lösen steifer Differentialgleichungen bevorzugt werden.
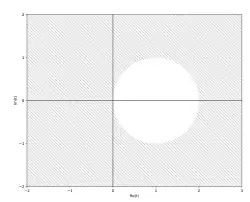
Ein Beispiel dafür ist das implizite Euler-Verfahren, das angewendet
- ,

also nach Umstellen die Stabilitätsfunktion ergibt. Das resultiert dann im folgenden Stabilitätsgebiet und zeigt somit die A-Stabilität des Verfahrens:


Literatur
- E. Hairer, G. Wanner: Solving Ordinary Differential Equations II, Stiff problems, Springer Verlag