Radar-Altimeter
Mit Radar-Altimeter (RA, dt. Radarhöhenmesser oder Funkhöhenmesser) werden seit 1938[1] Radargeräte bezeichnet, die die Höhe eines Luftfahrzeuges oder Satelliten über Grund (engl. Above Ground Level, AGL) die im Gegensatz zu Primär-Radar-Anlagen (Primary Surveillance Radar, PSR) nur die Höhe AGL durch die Laufzeit zwischen der Aussendung von hochfrequenten Signalen durch den Radar-Altimeter-Sender und dem Empfang eines am Erdboden reflektierten Echos im Radar-Altimeter-Empfänger bestimmen.[2]
Barometrische Höhenmesser (engl. Barometric Altimeter) werden zwar auch zur Höhenmessung eines Luftfahrzeuges über Grund verwendet, wobei die Anzeige aus dem Luftdruck abgeleitet wird, der auf den Luftdruck in Höhe des Meeresspiegels (QNH, 1013 hPa) definiert wurde. Da jedoch lokal der Luftdruck variieren kann, muss anders als beim Radar-Altimeter bei Nutzung des barometrischen Höhenmessers während des Anflugs dieser auf den aktuell auf dem Zielflugplatz herrschenden Platzluftdruck eingestellt werden.
Barometrische Höhenmesser und Radar-Altimeter gehören mittlerweile zur Navigationsausrüstung von kommerziell genutzten Luftfahrzeugen. Im Gegensatz zu barometrischen Höhenmessern werden Radar-Altimeter in der Regel nur während des Anflugs bis zur Landung eines Luftfahrzeuges in Höhen von max. 2500 ft (engl. feet, dt. Fuß) genutzt. Obwohl manche FMCW-Radar-Altimeter auch bis 5000 ft oder höher die Höhe über AGL messen konnten, erfolgt die Messung, da Radar-Altimeter mit einer analogen Schnittstelle gemäß dem Standard ARINC-552 A im Gegensatz zur Nutzung der digitalen ARINC Daten-Schnittstelle auf 2500 ft begrenzt waren, derzeit nur noch bis 2500 ft.[3]S.3ff, [4] Radar-Altimeter nach dem FMCW-Prinzip (Erklärung siehe unten) wurden auch schon für Maximalhöhen von 20 000 ft AGL gebaut[5]S.8ff, während gepulste Radar-Altimeter bis 70 000 ft AGL oder mehr gebaut wurden, z. B. der Typ AN/APN-159.[6]
Vereinzelt wurde die Messung der Höhe auch als Distance (dt. Entfernung) und Radar-Altimeter daher als Distance Measuring Equipment bezeichnet, was jedoch zu Verwechslung mit dem von der ICAO seit 1950 in ICAO Annex 10 standardisierten Distance Measuring Equipment führen konnte. ICAO DME nutzen im Gegensatz zu PSR-Sensoren für die Messung der Schrägentfernungen zwischen den in Luftfahrzeugen eingebauten Interrogatoren (dt. Abfrager) die aktiven Antworten auf die Abfragen, die von verzögert antworteten Transponder am Boden ausgestrahlt werden.[7]
Je nach Alter, technischen Anforderungen, z. B. geforderte max. Höhe über Grund, Genauigkeit und geforderte Auflösung der Höhenmessung oder der Update-Rate-Messwerte werden unterschiedliche-Modulationsarten verwendet. Dabei unterscheidet man zwischen:
- FMCW-Radar-Altimeter (engl. Frequency Modulated Continuous Wave Radio Altimeter, FMCW-RA, Dauerstichradar) und
- Puls-Radar-Altimeter (engl. Pulsed Radar Altimeter)
Für FM-CW-Radar-Altimeter für Luftfahrzeuge wurde von der Internationalen Fernmeldeunion (ITU) dem Flug-Navigationsfunkdienst (engl. Aeronautical Radionavigation) der Frequenzbereich von 4,2 GHz bis 4,4 GHz weltweit zugewiesenen.[8] In Deutschland ist diese Zuweisung in der Vollzugsordnung für den Funkdienst (VO Funk) geregelt.[9]
Puls-Radar-Altimeter für Luftfahrzeuge arbeiten, je nach Alter, technischen Anforderungen und Design, z. B. im L-Band bei 1,63 GHz[6] oder im X-Band zwischen 9,345 GHz und 9,406 GHz.[10]
Soll nicht nur die Höhe über Grund (AGL) für ein einzelnes Luftfahrzeug, sondern die Gelände-Topographie mittels eines Luftfahrzeuges oder Satelliten vermessen werden, ist der Aufwand um die gewünschte Auflösung zu erhalten (je nach geforderter Auflösung der Höhe und der Größe der erfassten Flächenzellen hierfür), weitaus höher. Die durch Messung erhaltene Daten werden dabei in einem digitalen Höhenmodell (engl. Digital Elevation Model, DEM)[11] zusammengefasst. Daraus kann man ein dreidimensionales Modell der Erdoberfläche berechnen. Bei der Berechnung des digitalen Höhenmodells versucht man meist störende Höhen-Messwerte, die von Reflexion von Objekten auf der Erdoberfläche, wie z. B. Bäume, Gebäude, Hochspannungsleitungen stammen, herauszufiltern.[12]
Außer traditioneller Methoden und Radar-Altimeter-Daten werden manchmal zur Erstellung von digitalen Höhenmodellen auch Messdaten verwendet, die mit Hilfe von LIDAR (engl. Light Detection and Ranging) oder SAR (engl. Synthetic Aperture Radar) erfasst wurden.[13] Bekannt sind z. B. DEM-Daten die während der Space Shuttle Radar Topography Mission (SRTM) erfasst wurden, durch das Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER) oder der Global Ecosystem Dynamics Investigation (GEDI).
Digitale Geländemodelle dienen z. B. auch zur Erstellung von topografischen Karten.
.jpg)
FMCW-Radar-Altimeter für Luftfahrzeuge
Radar-Altimeter verwenden für Flughöhen bis 5000 ft meist das FMCW-Verfahren, jedoch existieren auch gepulste Radar-Altimeter.[1], [14] Dabei strahlt der Sender eines Radar-Altimeters an Bord eines Flugzeugs ein linear frequenzmoduliertes Hochfrequenz-Signal (zwischen 4200 MHz bis 4400 MHz) über eine Antenne bezogen auf die horizontale Achse des Luftfahrzeuges senkrecht nach unten ab.
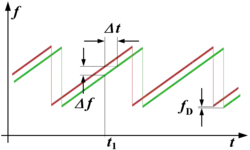
Das Signal wird am Erdboden reflektiert und in abgeschwächter Form über eine zweite Antenne von dem Empfänger des Radar-Altimeter an Bord des Flugzeugs empfangen, wobei es auch FMCW-Radar-Altimeter Designs gibt die nur eine Antenne benötigen, z. B. Sperry SPA-10.[15] Der Frequenzverlauf des empfangene Signals ist bedingt durch die Laufzeit in seinem Frequenzverlauf zeitlich verschoben. Die Zeitdifferenz Δt zwischen den Frequenzsprüngen ist dabei proportional zur Entfernung zum reflektierten Erdboden.[3]S.3ff,[14]
Da Radar-Altimeter fest mit dem Flugzeug verbunden sind, würde bei einer scharfen Bündelung des Sendesignals in eine feste Richtung durch Rollen und Nicken des Flugzeuges ein Messfehler entstehen. Deshalb werden Antennen mit einer relativ geringen Richtwirkung genutzt, die unabhängig von der Fluglage sicher in Richtung Erdboden strahlen. In der Radarsignalverarbeitung wird hier nur die geringste gemessene Differenzfrequenz zur Höhenberechnung verwendet. Diese zeigt immer auf die reflektierende Fläche mit der kürzesten Entfernung zum Flugzeug.
Da FMCW-Radar-Altimeter im Gegensatz zu gepulsten Radar-Altimetern kontinuierlich senden, werden konstruktionsbedingt bei den meisten FMCW-Radaren jeweils eine separate Sende- und eine Empfangsantenne verwendet, damit die schwachen Echos vom Erdboden nicht durch die von der Sendeantenne abgestrahlte Leistung maskiert werden. Um eine ausreichende Entkopplung zwischen der Sende- und der Empfangsantenne zu erreichen, werden beide mit ausreichendem großem Abstand in oder unter den Tragflächen eingebaut. Der Rumpf bildet eine zusätzliche Abschirmung zwischen beiden Antennen und verhindert so ein direktes Überkoppeln von der Sende- zur Empfangsantenne.

Beim Tiefflug kann in Militärflugzeugen am Radarhöhenmesser eine Warnhöhe stufenlos eingestellt werden (Terrainfolgeradar). Beim Unterschreiten dieser Höhe wird der Pilot durch ein Signal (optisch oder akustisch) gewarnt. Bei Instrumentenanflügen von Militär- oder Zivilflugzeugen wird ebenfalls ein Minimum eingestellt, bei dem der Radarhöhenmesser einen Alarm gibt. Hat der Pilot die Landebahn dann nicht in Sicht, muss er durchstarten. Der Radarhöhenmesser ist Vorschrift für einen Landeanflug gemäß CAT II oder CAT III (siehe auch: Instrumentenlandesystem); das Gelände für einen solchen Anflug ist dafür kartiert (Precision Approach Terrain Chart; PATC), um die Anzeige richtig interpretieren zu können.
Gepulste Radar-Altimeter für Luftfahrzeuge
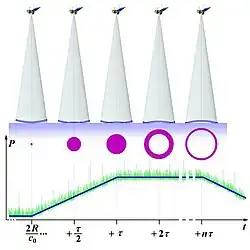
Wird ein Radar-Altimeter von einem Flugzeug in großer Höhe oder von einem Satelliten eingesetzt, so wird nicht das FMCW-Verfahren genutzt, sondern das Impulsradarverfahren[14] wie auch bei PSR-Radar Sensoren, jedoch wird bei gepulsten Radar-Altimetern im Gegensatz zu anderen PSR-Radar-Sensoren, nur die Entfernung zwischen einem Luftfahrzeug oder Satelliten und dem Erdboden ausgewertet. Mit zunehmender Höhe über Grund weitet sich das Antennendiagram am Boden auf, wodurch kein einzelner Punkt angestrahlt wird, sondern eine Fläche. Je nach Beschaffenheit des Terrains, z. B. Form und Reflektionseigenschaften, verformt sich das Echosignal während der Reflexion mehr oder weniger stark. Mit zunehmender Höhe über Grund, z. B. Satelliten, kann diese Verformung schon so stark sein, dass eine spezielle Radarsignalverarbeitung erforderlich wird. Die angestrahlte Fläche vergrößert sich allmählich, bis in der Mitte der ausgeleuchteten Fläche der Sendeimpuls bereits beendet ist, während am Rand der ausgeleuchteten Fläche erst die Reflexion des Sendeimpulses beginnt.
Die ehemals steile Flanke des Sendeimpulses ist bei dem Echosignal nicht mehr zu erkennen. Der ehemals kurze Sendeimpuls verliert sich in der steigenden Flanke des Echosignals. Die Impulsdauer des Echosignals kann sich auf ein Vielfaches der Dauer des Sendeimpulses vergrößern. Als Messpunkt für die Zeitnahme zur Laufzeitmessung wird der Punkt genutzt, an dem die steigende Flanke des Echosignals in das Impulsdach übergeht. Das ist vor allem bei der Nutzung von Intrapulsmodulation ein großes Problem, da sich verschiedene Abschnitte der Modulation zeitlich verschoben überlagern. Eine Phasenmodulation ist für Radaraltimeter deshalb nicht zweckmäßig, da die Phasencodierung spätestens im Impulsdach des Echosignales durch Interferenz verloren geht.
Kompatibilitätsprobleme zwischen 5G-Mobilfunk und Radar-Altimetern von Luftfahrzeugen
Seit ca. 2022 werden verstärkt potentielle Probleme der Funkverträglichkeit (elektromagnetische Kompatibilität) zwischen 5G-Mobilfunk und Radar-Altimetern von Luftfahrzeugen diskutiert.[9][16] Es gibt Pläne zahlreicher Staaten, in der Nachbarschaft des Radar-Altimetern-Frequenzbandes 4200 bis 4400 MHz neue Mobilfunksignale abzustrahlen.[9][16] Die USA erlauben unter Auflagen (Mindestabstände von Flughäfen) bereits 5G-Mobilfunk im Frequenzband 3450 bis 3980 MHz (220 MHz Abstand von der Unterkante des Radar-Altimterfrequnezbands bei 4200 MHz).[16] Unterdessen wird in Europa die Nutzung des Bandes 3400 bis 3800 MHz (400 MHz Abstand von der Unterkante des Radar-Altimeterfrequenzbands bei 4200 MHz) für 5G erwogen.
Messungen und Studien zeigen, dass insbesondere ältere Radar-Altimeter durch 5G-Mobilfunk gestört werden können. Da bis zur Zuweisung der benachbarten Frequenzbereiche für 5G-Basistationen nur wenige Sender in den benachbarten Frequenzbereichen von Radar-Höhenmessern sendeten, wurde in den Standards für RADAR-Altimeter nur eine mäßig starke Dämpfung für Signale ober- und unterhalb des von Radar-Altimetern-Empfängern für Aussendung und Empfang der Radar-Echos genutzten Frequenzbereiches von 4200 MHz bis 4400 MHz definiert. Die Empfindlichkeit der Radar-Altimeterempfänger gegenüber 5G-Signalen variiert zusätzlich mit dem verwendeten Empfängerdesign. Abhängig von der notwendigen Unterdrückung von 5G-Signalen und der vorhandenen Außerband-Dämpfung in älteren Radar-Altimeterempfängern auf der jeweiligen Betriebsfrequenz eines 5G-Senders, ergibt sich eine mehr oder weniger große fehlende Marge die zur Unterdrückung der abgestrahlten 5G-Signale fehlt.
Bereits zertifizierte und in Betrieb befindliche Radar-Altimeter sollen mittelfristig weiter genutzt werden. Bevor ein Mandat zur Nachrüstung durch eine neue robustere Radar-Höhenmessergeneration erfolgen kann, müssen jedoch die Standards für Radar-Altimeter überarbeitet und veröffentlicht werden.
Die fehlende Unterdrückung von 5G-Signalen kann daher nur durch eine ausreichend große Freiraumdämpfung (engl. Free-Space-Propagation-Attenuation), die einen mehr oder weniger großen Schrägentfernungsabstand erfordert, erreicht werden. Die Berechnung des notwendigen geografischen Abstandes (Schrägentfernung) zwischen 5G-Mobilfunkstation und dem Anflugbereich, in dem Radar-Altimeter genutzt werden, erfordert die Berücksichtigung der Dämpfung der Radar-Altimeter-Empfänger in dem Frequenzabstand zwischen der Mobilfunkfrequenz und dem genutzten Radar-Altimeter-Frequenzbereich sowie die Freiraumdämpfung auf der Betriebsfrequenz der 5G-Basisstation. Für eine ausreichend große Dämpfung sind z. T. größere Schutzabstände notwendig, um Störungen in allen Radar-Altimeter-Typen ausschließen zu können.[9]
Die Analysen, Messungen und Diskussionen in den zuständigen internationalen Arbeitsgruppen dazu dauern noch an (Stand August 2024). Auch das oberhalb des Radar-Altimeter-Frequenzbands gelegene Band 4400 bis 4900 MHz wird von der Mobilfunkindustrie für die Nutzung von 5G geprüft. Außer der Vorgabe, dass Mobilfunk-Basisstationen zum Schutz von Radar-Altimetern landender Flugzeuge einen Mindestabstand in der Frequenz sowie einen Mindestabstand zu den Luftfahrzeugen während des Anfluges einzuhalten haben, wird in den zuständigen Arbeitsgruppen bei RTCA und EUROCAE auch eine notwendige Verbesserung der Bandfilter in Radar-Altimetern vorbereitet.[17][14][18][19]
Einzelnachweise
- ↑ a b New Radio Altimeter Safeguards Air Travel, Pick-Ups, 1939,October. (worldradiohistory.com [PDF]).
- ↑ Massachusetts Institute of Technology, Radiation Labarotory Series, Band 2, Ed.1, Radar Aids to Navigation, Edited by John S. Hall, 1947. (archive.org).
- ↑ a b Radio Altimeter, M. Capelli, I-R-E Transactions Aeronautical and Navigational Electronics 1954.
- ↑ TRT, Radar Altimeter ERT-530A, Maintenance Manual.
- ↑ The AN APN-22 Radio Altimeter, F. T. Wimberly, J. F. Lane, Jr., I-R-E Transactions Aeronautical and Navigational Electronics 1954.
- ↑ a b NCAR/TN-160+EDD, The Measurement of Height and Slope of Isobaric Surfaces with an Airborne Radar Altimeter, E.N. Brown, C.A. Friehe, M.A. Shapiro, P.J. Kennedy, 1980.December, wayback machine abgerufen 2025.März.26. (ucar.edu [PDF]).
- ↑ Noise-Modulated Distance Measuring Systems, B. M.- HORTON, Proceedings of the IRE, Vol. 47, Issue 5, 1959.May.
- ↑ ITU, Radio Regulations Articles 1, ed 2024. S. fd (itu.int).
- ↑ a b c d Guidance on safeguarding measures to protect Radio Altimeter from potential harmful interference from Cellular 5G Communications, ICAO MID Doc 015. In: https://www.icao.int/. International Civil Aviation Organisation, ICAO, Mai 2023, abgerufen am 25. August 2024 (englisch).
- ↑ WADC, Technical Report 52-193, Test and Evaluation of Altimeter AN/APN-57, J. Paul Gorgi Cpt. USAF, Alber Goldman, 1952.April. (archive.org [PDF]).
- ↑ Digital Elevation/Terrain Model (DEM), NASA. (nasa.gov).
- ↑ Dr. Ulrich Kälberer: Untersuchungen zur flugzeuggetragenen Radaraltimetrie, Dissertation. In: https://www.ifp.uni-stuttgart.de. Universität Stuttgart, 1997, abgerufen am 11. April 2025.
- ↑ A short course on Altimetry, Paolo Cipollini, Helen Snaith, EASA. (esa.int [PDF]).
- ↑ a b c d Seth Frick (Honeywell): Radar Altimeters, Overview of Design andPerformance. In: https://avsi.aero/. Aerospace Vehicle Systems Institute (AVSI), 8. September 2021, abgerufen am 25. August 2024 (englisch).
- ↑ IEEE, Tenth Annual East Coast Conference on Aerospace and Navigational Electronics, Sperry Automatic Landing Radar Altimeter, D. E. Graham, B. S. Jacobson.
- ↑ a b c 5G and Aviation Safety. In: https://www.faa.gov. Federal Aviation Administration (USA), abgerufen am 25. August 2024 (englisch).
- ↑ https://skybrary.aero/articles/radio-altimeter. In: https://skybrary.aero. EUROCONTROL, abgerufen am 25. August 2024 (englisch).
- ↑ RTCA Special Committee (SC) 239 Low Range Radar Altimeter - Terms of Reference. In: https://www.rtca.org. 13. Februar 2025, abgerufen am 21. April 2025 (englisch).
- ↑ Lexikon der Luftfahrt Seite 222