Das mathematische Pendel oder ebene Pendel ist ein idealisiertes Pendel. Hierbei kann eine als punktförmig gedachte Masse, die mittels einer masselosen Pendelstange an einem Punkt aufgehängt ist, in einer vertikalen Ebene hin und her schwingen, wobei Reibungseffekte, insbesondere der Luftwiderstand vernachlässigt werden. Das ebene Pendel ist ein Spezialfall des Kugelpendels, das sich auch in andere Raumrichtungen bewegen kann. Da die Bewegung des Pendelkörpers auf einem vertikalen Kreis erfolgt, wird es auch als Kreispendel[1] bezeichnet, obwohl damit häufiger das Kegelpendel gemeint ist.
In der Praxis kann man ein mathematisches Pendel dadurch annähern, dass man einen möglichst langen und dünnen Stab oder (falls die Auslenkung kleiner als 90° ist) einen dünnen Faden und einen möglichst kleinen und schweren Pendelkörper verwendet. Dass bei diesem Aufbau die Schwingungsweite (Amplitude) erst nach einer großen Anzahl Schwingungen spürbar zurückgeht, zeigt, dass hierbei die Reibung nur einen geringen Einfluss hat.
Pendel, welche die genannten Eigenschaften des mathematischen Pendels nicht näherungsweise erfüllen, lassen sich durch das kompliziertere Modell des physikalischen Pendels beschreiben.
Die Schwingungsdauer ist unabhängig von der Masse des schwingenden Körpers. Bei kleinen Schwingungen ist die Schwingungsdauer auch nahezu unabhängig von der Größe der Amplitude. Hier zeigt das Pendel eine nahezu harmonische Schwingung, deren Schwingungsdauer ausschließlich von der Länge des Pendels und der herrschenden Schwerebeschleunigung bestimmt wird. Die Schwingungsdauer verlängert sich bis ins Unendliche, je näher die Amplitude an 180° herankommt. Wenn die Bewegungsenergie genau so groß ist, dass der Punkt für das obere instabile Gleichgewicht erreicht werden kann, dann vergeht ohne Reibungseffekte eine unendlich lange Zeit bis zum Stillstand. Wenn die Bewegungsenergie größer ist, bewegt sich der Pendelkörper periodisch im Kreis.
Mathematische Beschreibung
Bewegungsgleichung
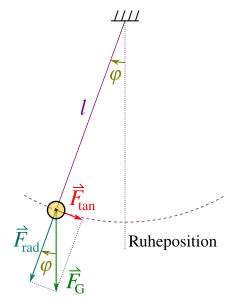
Die Rückstellkraft ist durch den tangentialen Anteil der Gewichtskraft gegeben, der mit Hilfe eines Sinus ermittelt werden kann:
Anhand der Kräfte wird im Folgenden die Bewegungsgleichung der Pendelschwingung aufgestellt.
Aufgrund der Schwerkraft (, = Schwerebeschleunigung) ergibt sich bei Auslenkung eines Fadenpendels der Masse eine Kraft , die tangential zur kreisförmigen Pendelbahn wirkt. Die radiale Komponente spielt für die Bewegung keine Rolle, da sie in Richtung des Fadens wirkt. Da das mathematische Pendel nur einen Freiheitsgrad besitzt, genügt eine skalare Gleichung. Der Betrag der Rückstellkraft steigt mit dem Auslenkungswinkel bezüglich der Ruhelage. Hierbei zeigt der Vektor der Rückstellkraft immer in Richtung der Ruheposition, daher ergibt sich ein Minus in folgender Gleichung:
Beim Betrachten eines schwingenden Fadenpendels zeigt sich, dass die Geschwindigkeit mit zunehmender Auslenkung abnimmt und nach Erreichen des Scheitelpunkts die Richtung wechselt. Die Geschwindigkeitsänderung bedeutet, dass die Pendelmasse eine Beschleunigung erfährt, genauer gesagt findet eine Tangentialbeschleunigung statt, da eine kreisförmige Bewegungsbahn vorliegt. Die Bewegungsgleichung lautet nach dem 2. Newtonschen Gesetz:
Die Tangentialbeschleunigung lässt sich durch die Winkelbeschleunigung ausdrücken.
Bei der ungestörten Schwingung stellt die Rückstellkraft des Pendels die einzige äußere Kraft dar. Nach Umstellen und Kürzen der Masse entsteht eine nichtlineare Differentialgleichung zweiter Ordnung:
die sich mit Hilfe der Winkelgeschwindigkeit auch als System von zwei gekoppelten Differentialgleichungen erster Ordnung schreiben lässt:
,
.
Bewegungsgleichung in kartesischen Koordinaten
Neben der Bewegungsgleichung mit dem Winkel existieren weitere mögliche Beschreibungsformen. So lässt sich die Bewegung des mathematischen Pendels auch als Vektordifferentialgleichung mit kartesischen Koordinaten formulieren. Eine mögliche Herleitung erfolgt über den Lagrange-Formalismus mit Lagrange-Multiplikator. Die holonome Zwangsbedingung findet sich dabei mit dem Gedanken, dass die Länge des Pendelarms der Länge des Ortsvektors entspricht. Da die Länge des Pendelarms beim mathematischen Pendel konstant ist, muss folglich gelten:
Anhand dieser holonomen Zwangsbedingung findet sich die unten stehende Vektordifferentialgleichung. Dabei stellt der erste Term die Zentripetalbeschleunigung und der zweite Term den an die Kreisbahn tangentiell wirkende Anteil der Schwerebeschleunigung dar. In dieser Darstellung entfällt die Länge des Pendelarmes in der Differentialgleichung. Allerdings wird durch die Anfangswerte definiert, welche sich in Abhängigkeit von den Anfangswerten des Winkels und der Winkelgeschwindigkeit darstellen lassen.
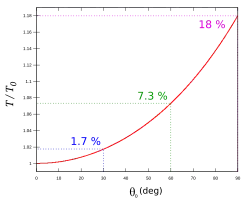
Abhängigkeit der Periode vom maximalen Auslenkungswinkel θc.
Da Pendel in der Realität immer mehr als infinitesimal ausgelenkt werden, verhalten sie sich nichtlinear, d. h., Schwingungen mit endlicher Amplitude sind anharmonisch. Die Lösung der allgemeinen Differentialgleichung erfordert den Einsatz elliptischer Funktionen und elliptischer Integrale.
Gegeben ist die Differentialgleichung
.
Diese kann mittels der jacobischen elliptischen Funktionen und gelöst werden. Die erhaltenen Formeln für Phase, Winkelgeschwindigkeit und -beschleunigung des Pendels lauten:
,
,
Der maximale Ausschlagswinkel liegt unterhalb von .
Die Periode der Pendelschwingung ergibt sich aus der Periodizität der Funktion . So führt
zu
.
Damit lässt sich die allgemeine Lösung für die Periode in eine Reihe entwickeln:
Außerdem ist die Dämpfung durch Reibungsverluste bei einem echten Pendel größer als null, so dass die Auslenkungen ungefähr exponentiell mit der Zeit abnehmen.
Dass die Periodendauer nicht von , sondern nur von dem Verhältnis abhängt, lässt sich auch aus einer Dimensionsanalyse, z. B. mit dem buckinghamschen Π-Theorem, herleiten. Nur der numerische Faktor ( bei kleinen Amplituden, in der exakten Lösung) ist so nicht zu ermitteln.
Der Winkel als explizite Funktion der Zeit mit Startwinkel und (positiver) Startgeschwindigkeit lautet
mit , wobei die Jacobi-Amplitude und das elliptische Integral erster Art ist (hier sind die elliptischen Module in Mathematica-Konvention bereits quadriert angegeben). Bei negativem kann die Situation einfach gespiegelt werden, indem das Vorzeichen des Startwinkels vertauscht wird.[2] Mit und kleinen Werten von (auf dem Hauptzweig der Jacobi-Amplitude) ist dieser Ausdruck dem äquivalent, das mithilfe des Arcustangens und der Jacobi-cn-Funktion berechnet wurde (s. o.).
Numerische Lösung
Durch numerische Integration der beiden Differentialgleichungen 1. Ordnung lässt sich eine Näherungslösung rekursiv berechnen. Mit dem einfachsten Integrationsverfahren (Euler explizit) und der Schrittweite ergibt sich für die Winkelgeschwindigkeit:
Für den Winkel kann die zuvor berechnete Winkelgeschwindigkeit benutzt werden:
Die Anfangswerte für Winkelgeschwindigkeit und Winkel sind dem Index zugeordnet.
Die Genauigkeit der Lösung lässt sich durch Simulation über mehrere Perioden und Anpassung der Schrittweite überprüfen. Dieses Verfahren ist in der Physik auch als Methode der kleinen Schritte bekannt.
Erhaltungssätze
Beim mathematischen Pendel gilt der Energieerhaltungssatz der Mechanik. Auf dem Weg von der maximalen Auslenkung zur Ruhelage nimmt die potentielle Energie ab. Die mit ihr verbundene Gewichtskraft – genauer: deren tangentiale Komponente – verrichtet Beschleunigungsarbeit, wodurch die kinetische Energie zunimmt. Nach Durchschreiten des Minimums wirkt eine Komponente der Gewichtskraft entgegen der Bewegungsrichtung. Es wird Hubarbeit verrichtet.
Auch hieraus lässt sich die Differentialgleichung herleiten:
Die Summe ist zeitlich konstant, also
Diese Gleichung hat zwei Lösungen:
, es gibt keine Bewegung; diese Lösung kann man hier unbeachtet lassen.
; diese Lösung stimmt mit der Lösung oben überein.
Anhand der Energieerhaltung kann die maximale Geschwindigkeit der Pendelmasse nach Loslassen beim Winkel berechnet werden:
Die maximale Geschwindigkeit wird im tiefsten Punkt der Pendelmasse erreicht, d. h. wenn der Faden senkrecht ist.
Resultierende Differentialgleichung
Durch Energieerhaltung erhält man auch eine gewöhnlich nichtlineare Differentialgleichung erster Ordnung für statt zweiter Ordnung. Sei hierzu die Energie
vorgegeben, wobei die Größen und zur Vereinfachung der Schreibweise eingeführt wurden. Unter der Annahme kann man diese Gleichung explizit nach auflösen:
wodurch die Ordnung der Differentialgleichung um eins reduziert wird im Vergleich zur ursprünglichen Differentialgleichung . Im letzten Schritt das Additionstheorem verwendet.
Unter der Einschränkung , kann die Differentialgleichung formal mittels Trennung der Variablen gelöst werden:
Das Integral auf der rechten Seite lässt sich im Allgemeinen jedoch nicht analytisch berechnen, womit man nicht nach der gesuchten Lösung auflösen kann.
Je nach Energie kann man jedoch zwischen verschiedenen Lösungentypen unterscheiden:
Ruhendes Pendel
Für sind mit die einzigen Lösungen der obigen Differentialgleichung, welche den stabilen Gleichgewichtslagen entsprechen (siehe unten). Für gibt es keine Lösungen, da das absolute Energieminimum ist.
Schwingendes Pendel
Ist reicht die kinetische Energie des Pendels nicht aus, um die maximale potentielle Energie zu überwinden. Daher erhält man für
und entsprechend wechselt bei
sein Vorzeichen um, d. h. das Pendelt schwingt hin und her. Die Differentialgleichung für ist jeweils nur für eine halbe Schwingungsdauer gültig. Für die zweite Hälfte der Schwingungsdauer mit muss man ein Minus auf der rechten Seite der Differentialgleichung ergänzen. Die Schwingungsdauer des Pendels erhält man aus der obigen Formel für und
Die Substitution liefert schließlich die obige Formel
mit dem elliptische Integral
Die Lösungen für entsprechen den geschlossenen Trajektorien im unten dargestellten Phasenraum.
Überschlagenes Pendel
Man beachte, dass man für und aus der Differentialgleichung für alle erhält, da die kinetische Energie die maximale potentielle Energie übersteigt und sich das Pendel somit überschlagen kann. Auch hierfür lässt sich die (Überschlags-)Periodendauer , welche durch für alle definiert ist, aus der obigen Formel mit und berechnen:
wobei im letzten Schritt substituiert wurde und die Definition des elliptischen Integrals eingesetzt wurde.
Im Phasenraum sind die Lösungen für nicht geschlossene, -periodische Funktionen gemäß der obigen Differentialgleichung , welche für alle Werte von wohldefiniert ist.
Separatrix
Der Grenzfall stellt ein Sonderfall dar. In diesem vereinfacht sich die Differentialgleichung zu
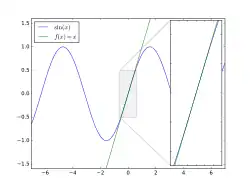
Für mit verschwindet die rechte Seite und man erhält für alle . Dies entspricht der instabilen Gleichgewichtslage (siehe unten). Für alle anderen Startwerte mit erhält man
Auflösen nach liefert
Offensichtlich ist die Anfangsbedingung erfüllt und die rechte Seite konvergiert gegen für und somit gilt
d. h. die Lösung konvergiert gegen einen der Fixpunkte. Dies kann man auch als Pendel mit Schwingungsdauer ansehen. Dies erhält man ebenso im Grenzfall bzw. aus den anderen beiden Fällen, da für gilt, d. h. ein Pendel das sich fast bzw. gerade so überschlägt hat eine sehr große Schwingungsdauer.
Die Lösungen für bezeichnet man auch als Separatrix, da deren Trajektorien im Phasenraum Lösungen mit unterschiedlichen Langzeitverhalten voneinander trennt. Dabei sind Lösungen mit unterschiedlichen Langzeitverhalten hier genau die beiden oben beschriebenen Zustände von schwingenden und sich überschlagenden Pendeln.
Gleichgewichtspunkte im Phasenraum
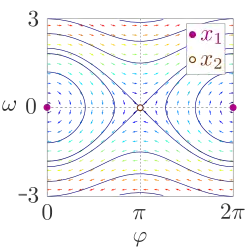
Phasenraum des ebenen Pendels mit g = l = 1. Der Phasenraum ist bezüglich des Winkels periodisch mit Periode 2π.
Gleichgewichtspositionen
Der Zustand des Systems lässt sich durch einen Punkt im Phasenraum, d. h. durch ein Tupel aus dem Winkel und der Winkelgeschwindigkeit beschreiben.
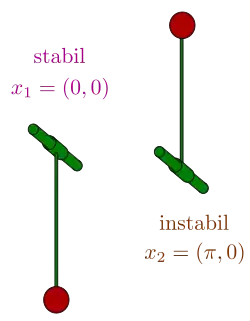
Es gibt zwei Positionen und , bei dem sich das System in einem mechanischen Gleichgewicht befindet. In beiden Punkten ist die Winkelgeschwindigkeit und die Summe aller angreifenden Kräfte und Momente Null. Der Gleichgewichtspunkt bei einem Winkel von Null ist das stabile Gleichgewicht, wenn das Pendel keine Auslenkung und Geschwindigkeit besitzt. Der zweite Punkt ist das instabile Gleichgewicht, wenn das Pendel keine Geschwindigkeit besitzt und „auf dem Kopf“ steht.
Literatur
Ekbert Hering, Rolf Martin, Martin Stohrer: Physik für Ingenieure. 8. Auflage. Springer, Berlin Heidelberg New York 2002, ISBN 3-540-42964-6.



































![{\displaystyle \alpha (t)=-{\frac {g}{l}}\cdot \sin[\varphi (t)]}](./14f1f2c566cb020c2368dc5a9a5862ac1c65a99b.svg)


![{\displaystyle \varphi (t)=2\cdot \arctan \left[\tan \left({\frac {\varphi _{\text{max}}}{2}}\right)\cdot \operatorname {cn} \left[{\sqrt {\frac {g}{l}}}\cdot t;\sin \left({\frac {\varphi _{\text{max}}}{2}}\right)\right]\right]}](./508d08fc42af2196a3d9ab7b896c3bfe43f5905c.svg)
![{\displaystyle \omega (t)=-{\sqrt {\frac {g}{l}}}\cdot \sin \left(\varphi _{\text{max}}\right)\cdot \operatorname {sd} \left[{\sqrt {\frac {g}{l}}}\cdot t;\sin \left({\frac {\varphi _{\text{max}}}{2}}\right)\right]}](./5b7924d3588b8f2b9c4a23bb5c5863afcc1635ed.svg)
![{\displaystyle \alpha (t)=-{\frac {g}{l}}\cdot \sin \left(\varphi _{\text{max}}\right)\cdot \operatorname {cd} \left[{\sqrt {\frac {g}{l}}}\cdot t;\sin \left({\frac {\varphi _{\text{max}}}{2}}\right)\right]/\operatorname {dn} \left[{\sqrt {\frac {g}{l}}}\cdot t;\sin \left({\frac {\varphi _{\text{max}}}{2}}\right)\right]}](./570293892c1e99d6440d0b1750cd573f28a22c0c.svg)


![{\displaystyle \operatorname {cn} \left[c(t+T);k\right]=\operatorname {cn} \left[c\cdot t+4K(k);k\right]}](./a5987baaf91296f96d6c8d4a00344cfb63ca2c26.svg)
![{\displaystyle T(\varphi _{\text{max}})=4\cdot K\left[\sin \left({\frac {\varphi _{\text{max}}}{2}}\right)\right]\cdot {\sqrt {\frac {l}{g}}}}](./0c56c9f8908f0a67359ab244cb385cbacd927644.svg)












































![{\displaystyle \varphi _{\mathrm {max} }=\arccos \left({\frac {E_{0}-E}{E_{0}}}\right)=2\arcsin \left({\sqrt {\frac {E}{2E_{0}}}}\right)\in [0,\pi )\quad {\text{und}}\quad \varphi _{\mathrm {min} }=-\varphi _{\mathrm {max} }\in (-\pi ,0]}](./e96c252fa9fa7db25559e858d805bf4f959a0caf.svg)






















![{\displaystyle {\begin{aligned}2\omega _{0}t=&\int _{\varphi (0)}^{\varphi (t)}{\frac {\mathrm {d} \varphi }{\cos(\varphi /2)}}=\left[2\ln \left|{\frac {1+\sin(\varphi /2)}{\cos(\varphi /2)}}\right|\right]_{\varphi (0)}^{\varphi (t)}=\left[\ln \left|{\frac {1+\sin(\varphi /2)}{1-\sin(\varphi /2)}}\right|\right]_{\varphi (0)}^{\varphi (t)}\\=&\ln \left|{\frac {1+\sin(\varphi (t)/2)}{1-\sin(\varphi (t)/2)}}{\frac {1-\sin(\varphi (0)/2)}{1+\sin(\varphi (0)/2)}}\right|.\end{aligned}}}](./e41d4bec0622939fe33980662f9f6fa6988192c5.svg)